Lei de Ohm Ω
Corrente Contínua
Corrente Contínua
Diz-se que existe corrente elétrica num circuito quando há um fluxo de elétrons no condutor. Se há apenas carga elétrica sem movimento não existindo corrente dizemos que há eletricidade estática ou campo elétrico.
Se a corrente ou fluxo de elétrons se movimenta em apenas um sentido, dito sentido convencional do pólo positivo para o negativo e sentido eletrônico ou real do pólo negativo para o positivo (pois é no pólo positivo onde há maior número de elétrons e este possui carga dita negativa) temos então a chamada corrente contínua, ou seja, aquela que pode até variar a intensidade porém não muda seu sentido de movimento.
Para existir fluxo de elétrons deve existir uma diferença de potencial ddp (unidade volt) entre os pólos do circuito, ou seja, se os potenciais elétricos forem iguais não haverá fluxo algum. Basicamente isso acontece com a pilha ou uma bateria comum, quando está em plena carga apresenta um ddp de 1,5v e conforme o uso vai se desgastando até tender ao 0v. Porém é mais provável que tenhamos que descarta-la ou carrega-la antes que chegue a 0v pois dependendo do circuito que alimente antes disso já não terá utilidade alguma.
Se a corrente ou fluxo de elétrons se movimenta em apenas um sentido, dito sentido convencional do pólo positivo para o negativo e sentido eletrônico ou real do pólo negativo para o positivo (pois é no pólo positivo onde há maior número de elétrons e este possui carga dita negativa) temos então a chamada corrente contínua, ou seja, aquela que pode até variar a intensidade porém não muda seu sentido de movimento.
Para existir fluxo de elétrons deve existir uma diferença de potencial ddp (unidade volt) entre os pólos do circuito, ou seja, se os potenciais elétricos forem iguais não haverá fluxo algum. Basicamente isso acontece com a pilha ou uma bateria comum, quando está em plena carga apresenta um ddp de 1,5v e conforme o uso vai se desgastando até tender ao 0v. Porém é mais provável que tenhamos que descarta-la ou carrega-la antes que chegue a 0v pois dependendo do circuito que alimente antes disso já não terá utilidade alguma.
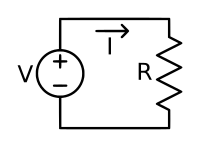
Todo condutor possui uma resistência a passagem do fluxo de elétrons, e isso aliado a ddp determinará a intensidade do fluxo de elétrons, sendo que:

V - voltagem (v)
R - resistência (ohm) ou Ω
R - resistência (ohm) ou Ω
I - intensidade da corrente (ampere)
Portanto, pela lei de ohm acima determinamos que quanto maior a voltagem maior a corrente e por outro lado, quanto maior a resistência menor a corrente.
A corrente é o resultado dos dois outros parâmetros nos quais podemos ter controle! A corrente não determina nenhum dois outros dois parâmetros!
Ex.: Se v=10 e R=10ohm a corrente será:
I=V/R
I=10/10=1A

Se a voltagem é contínua a corrente tmbém será. CC ou DC
Potência
É a grandeza que mede o o trabalho realizado pela corrente elétrica em um determinado intervalo de tempo. Unidade Watt (lê-se uat).

No exemplo anterior: P = 10V . 1A = 10 W.
Em um circuito resistivo, ou seja, um circuito que apresente apenas resistência e nenhuma capacitância ou indutância (que veremos adiante), a potência é totalmente dissipada sendo convertida em calor. O efeito joule é o que expressa o aquecimento de um condutor que possua resistência (todos possuem). Efeito joule é inerente a passagem de corrente com resistência e algumas vezes é bem vindo e na maioria das vezes um vilão, pois representa desperdício de energia.
Corrente Alternada
A corrente alternada é aquela que muda seu sentido de propagação ou movimento periodicamente. Portanto existe frequência na mudança de sentido maior que zero, enquanto na CC essa frequência é exatamente 0Hz.
 |
| CC = DC - corrente contínua CA = AC - corrente alternada |
 |
| Exemplo de uma corrente alternada de onda quadrada, muito usada em circuitos digitais. |

É claro que a forma mais comum e usada é a senoidal entre outras como dente de serra, triangular.
Valor Eficaz de CA senoidal
Como podemos ver na figura acima de tensão senoidal o Vp- valor de pico não se mantém por todo o tempo no ciclo. O valor de pico a pico Vpp é o dobro do valor de pico Vp, mas apenas por uma questão de referência, pois se trata da mesma tensão que inverteu seus pólos.
Mas como já dito, o Vp é verdadeiro em apenas uma fração do tempo do ciclo e não pode ser considerado ao se comparar o valor de tensão alternada com o de uma tensão contínua, pois na maior parte do tempo do ciclo o valor da tensão é menor que o Vp.

VRMS = 100 / √2 = 70,7v
Uma tensão senoidal de 100V de pico é aplicada a uma resistência de X Ohms. Se ao mesmo resistor for aplicado uma tensão de 70,7V contínuos, a dissipação de potência será a mesma.
A tensão nominal de 110V ou 220V encontrada nas tomadas residenciais já se encontra no valor eficaz.
Capacitor em CC
O capacitor também conhecido como condensador ou acumulador é um dispositivo que basicamente pode ser composto por duas placas entre as quais se encontra um dielétrico. Essas placas acumulam cargas estáticas, quando submetidas a uma ddp apropriada.
O capacitor seria uma bateria ideal se pudesse ter carga alta o suficiente em relação ao tamanho, pois quase não tem resistência interna e portanto se carrega ou descarrega sem perdas e de forma muito rápida. Uma bateria de qualquer tipo embora tenha a vantagem, que aliais justifica seu uso, de altas cargas/peso possui elevada resistência interna e por esse motivo possui carga lenta e tanto na carga quanto no uso dissipa muito calor ( efeito joule) , desperdiçando energia.

A capacitância que é o fenômeno elétrico desejado no capacitor é medida em Farad. Como o farad é uma unidade muito grande geralmente usamos seus submúltiplos uF (microfaraday), nF ou pF (nano e pico). Alem da capacitância o componente possui voltagem máxima a qual deve ser submetido, e nos eletrolíticos a polaridade de cada terminal, já que nos demais tipos os terminais não possuem tal característica.
Um capacitor quando submetido a uma corrente contínua tem o seguinte comportamento:

No momento em que é ligado à bateria a tensão em seus terminais é zero, e a partir daí ele passa a carregar segundo o gráfico acima até o momento em que a voltagem seja igual a da fonte encerrando-se assim o carregamento e a passagem de corrente. O tempo de carregamento depende ca capacitância, da voltagem e da resistência em série ou do próprio condutor. Quanto maior a resistência em serie maior o tempo de carregamento.
A partir desse momento o capacitor passa a não permitir mais passagem de corrente se tornando um circuito aberto para CC. Portanto é correto dizer que o capacitor bloqueia corrente contínua.
Na verdade existe uma relação mais complicada de fases entre corrente e tensão que não abordaremos profundamente nesta aula, já que intuito é só o de familiarizar-nos com esses componentes e seu uso em filtros e afins no áudio.
Capacitor em CA
O capacitor ligado em correte alternada impõe uma oposição a passagem da corrente, que difere da simples resistência ohmica mas é medida com a mesma unidade, o ohm Ω. Essa oposição é chamada reatância e como se origina da capacitância, reatância capacitiva Xc.
Reatância Capacitiva
É a medida da oposição oferecida pelo capacitor à passagem da corrente alternada é calculada por:
 Isso em um circuito ideal, puramente capacitivo sem resistência!
Isso em um circuito ideal, puramente capacitivo sem resistência!
Xc - reatância capacitiva Ω
f - frequencia Hz
C - capacitancia Farads
Notamos que a reatância capacitiva é inversamente proporcional a frequência, ou seja, quanto maior a frequência menor a reatância. O capacitor portanto, sendo ligado em CA opõe-se à passagem de baixas frequências e dá livre passagem para as altas frequências progressivamente.
Indutores
Chamamos de indutor a um fio enrolado em forma de hélice em cima de um núcleo que pode ser de ar ou de outro material.

O Indutor quando ligado em CC tem o comportamento de um fio qualquer ( com excessão do momento inicial ). Já se for ligado em uma CA irá impor uma reatância chamada indutiva tal que, quanto maior a frequencia da CA maior será o valor dessa reatância indutiva, ou seja, o valor da reatância indutiva é diretamente proporcional à frequência.

A figura acima representa o gráfico de corrente em um circuito indutivo em CC. Note que no momento em que é ligado o circuito, a tensão pode aparecer imediatamente mas a corrente demora ainda um tempo par vencer o campo induzido até que se estabiliza em t1. No momento em que é desligado aparece o fenômeno contrário em que a corrente ainda leva um tempo até desaparecer totalmente, pois aparecerá uma ddp contrária nesse instante. Notamos isso claramente quando desligamos uma chave e vemos um arco de corrente (fagulhamento elétrico) na chave. Isso se deve ao fato de termos em casa um circuito indutivo principalmente pelos motores ligados (geladeira etc) e também pela indutância parasita nos fios.
Em caso de indústrias e circuitos altamente indutivos essas chaves devem ser de tipo especial, geralmente em óleo para evitar esse fenômeno.
A reatância indutiva é dada por:
Em caso de indústrias e circuitos altamente indutivos essas chaves devem ser de tipo especial, geralmente em óleo para evitar esse fenômeno.
A reatância indutiva é dada por:
| Isso em um circuito ideal, puramente capacitivo sem resistência! XL - Reatância Indutiva f - frequência L - Indutância (Henry) |
Impedância
A impedância não é o somatório algébrico simples da reatância capacitiva ou indutiva e da resistência do circuito como poderíamos imaginar, pois como dito anteriormente não estamos analisando a diferença de fase em um circuito capacitivo em CA entre a tensão e a corrente. Apenas para mencionarmos, em um circuito resistivo tensão e corrente estão em fase portanto com 0° de defasagem. Em um circuito capacitivo a corrente estará adiandata em relação a tensão. Em um circuito indutivo a corrente estará atrasada em relação a tensão. Esse ângulo de defasagem determina a predominância do circuito, pois enquanto a capacitância tende a adiantar a corrente, um indutivo tende a atrasar e quanto mais resistivo for um circuito mas tende a desfazer o efeito dos capacitores e indutores e levar a defasagem a zero.
Note que na prática dificilmente teremos um circuito apenas de um tipo, ou seja, com ângulos de 0° (resistivo), -90° ( capacitivo ) ou 90° ( indutivo ) mas sim, ângulos intemediários ou que se aproximem muito desses valores absolutos, pois sempre existirá resistência e é muito provável que existiram capacitâncias e/ou indutâncias parasitas.
Mas de qualquer forma, a impedância geral de um circuito será dada pela análise fasorial e somatória vetorial entre reatâncias e resistências.
Portanto embora não entraremos em detalhes maiores, podemos considerar a Impedância como resultado de todas as resistências e reatâncias de um circuito, medido numa frequência específica, isto pois como vimos para cada uma a reatância e assumirá valores diferentes. Desde que as impedâncias comparadas tenham sido obtidas em uma mesma frequência podem ser comparadas para os nossos objetivos.
Note que na prática dificilmente teremos um circuito apenas de um tipo, ou seja, com ângulos de 0° (resistivo), -90° ( capacitivo ) ou 90° ( indutivo ) mas sim, ângulos intemediários ou que se aproximem muito desses valores absolutos, pois sempre existirá resistência e é muito provável que existiram capacitâncias e/ou indutâncias parasitas.
Mas de qualquer forma, a impedância geral de um circuito será dada pela análise fasorial e somatória vetorial entre reatâncias e resistências.
Portanto embora não entraremos em detalhes maiores, podemos considerar a Impedância como resultado de todas as resistências e reatâncias de um circuito, medido numa frequência específica, isto pois como vimos para cada uma a reatância e assumirá valores diferentes. Desde que as impedâncias comparadas tenham sido obtidas em uma mesma frequência podem ser comparadas para os nossos objetivos.
Filtros Passivos
Genericamente, filtros são circuito que deixam passar só sinais de determinadas freqüências, atenuando outras. Podemos ter os seguintes tipos de filtros:
Filtros Passa Altas (FPA )
Filtros Passa Baixas (FPB)
Filtro Passa Faixa (FPF)
Filtro Rejeita Faixa (FRF)
Um filtro é dito passivo quando for composto apenas de elementos passivos, ou seja, que não amplifiquem o sinal, tal como transistores e valvulas. Um filtro passivo apenas rejeitará frequências selecionadas.
Se considerarmos o filtro ideal as curvas de respostas em freqüência (gráfico do ganho em função da frequencia) serão as seguintes:
Se considerarmos o filtro ideal as curvas de respostas em freqüência (gráfico do ganho em função da frequencia) serão as seguintes:




Na prática não é possível ter essas curvas devido a limitações nos elementos que constituem esses filtros.
Existem varias maneiras de construí-los, consideraremos apenas algumas.
Passa Altas

Note que o capacitor bloqueará as baixas frequências e deixará passar as altas até o ponto Vs.

Passa Baixas
Tente agora entender porque o filtro bloqueia as altas.
| fc - frequência de corte superior |


Passa Faixa
 | |
| Enquanto o indutor rejeita as altas o capacitor rejeita as baixas, com calculos das frequências de corte inferior e superior chegaremos à faixa passante. |
 |
| Crossover Passivo |

Crossover Passivo
Antes mesmo de analisarmos os transdutores eletro-acústicos em detalhes, como sabido existe um tipo deles para cada faixa de frequência e portanto deve-se proteger cada um deles, mesmo que alguns mais que outros de frequências fora da sua especificação.
Para tal podemos lançar mão de dispositivos que separem um
sinal full em faixas mais estreitas que serão aplicadas em seu respectivo transdutor. Crossover é um filtro feito com esse intuito.
Os divisores de frequência podem ser classificados em ativos e passivos. Os divisores ativos são usados em sistemas de som mais sofisticados, sendo instalados entre o pré-amplificador e o amplificador de potência.
Os divisores de frequência podem ser classificados em ativos e passivos. Os divisores ativos são usados em sistemas de som mais sofisticados, sendo instalados entre o pré-amplificador e o amplificador de potência.
Os divisores passivos são os rotineiramente mais
usados e podem ser instalados tanto na mesma posição que os ativos, isto
é, entre o pré-amplificador e o amplificador de potência, como nos
próprios transdutores (o que é o caso mais comum).
Os divisores de frequência passivos são constituídos pela associação série e/ou paralelo de elementos reativos (que possuem reatâncias).
A solução matemática do
problema é realizada através de cálculos bastante complexos. Para quem desejar maiores
detalhamentos desse assunto, a Audio Engineering Society (AES) traz
numerosos estudos a respeito.
Ordem de Filtros
 Os divisores passivos dividem-se pela inclinação da curva de corte, sendo essa inclinação medida em quantos decibeis o filtro reduzirá a partir do corte por oitava, ou seja dobro ou metade da frequência de corte. Os filtros mais amenos têm atenuação de 6dB/oitava, e por isso chamados de filtro de 1ª ordem.
Os divisores passivos dividem-se pela inclinação da curva de corte, sendo essa inclinação medida em quantos decibeis o filtro reduzirá a partir do corte por oitava, ou seja dobro ou metade da frequência de corte. Os filtros mais amenos têm atenuação de 6dB/oitava, e por isso chamados de filtro de 1ª ordem. Este filtro permite que muitas frequências fora da banda de operação do sonofletor passe.
Este filtro permite que muitas frequências fora da banda de operação do sonofletor passe.
Para operar com este filtro os falantes deverão operar ou tolerar uma faixa larga de frequências.
Tem a vantagem de causar menor desalinhamento fasorial entre os falantes por isso também chamado de 'linear phase' e de ser o mais barato e menos complexo de todos.
 | |
| Filtro 2ª Ordem |
O filtro de 2ª ordem emprega dois elementos reativos por ramo de circuito, um indutor e um capacitor.
Esse filtro de 2ª ordem permite cortes de 12dB/oitava de inclinação e assim, exigindo sonofletores bem menos amplos que os de 1ª ordem.
No entanto tem a desvantagem de os sinais elétricos nas saidas do divisor encontrarem-se em contrafase, em 180° de diferença, provocando um ponto de amplitude nula na frequência de corte! Muitos resolvem isso invertendo a polaridade de um dos falantes mas ao mesmo tempo que resolve cria outro problema pois cria um pico de 3 dB na frequência de corte acompanhado de um deslocamento de fase de 180º no restante das banda passante de graves e agudos. Existe a solução de criar uma outra banda e usar um falante para cobrir essa faixa de frequência cancelada, o que apesar de mais custosa parece uma melhor solução.
Os divisores de 3a ordem empregam três elementos reativos por ramo. Apesar da maior complexidade, é o mais indicado tecnicamente, pois permite curta faixa de interferência de frequencias entre um os falantes, e também assegura um menor defasamento na frequência de corte. Isto proporciona uma resposta mais plana e uniforme em toda a extensão em torno do corte, sendo virtualmente idêntica à do filtro de 1a ordem. Ou seja, com excessão do custo maior pelo numero de componentes e maior complexidade de cálculos, apresenta as vantagens do filtro de 1ª ordem sem apresentar todos as suas desvantagens.

Até o momento apresentamos filtros das 3 ordens de apenas duas vias (agudos e graves), para um primeiro contato e facilidade de análise, mas os filtros podem ser sintonizados para atuarem em qualquer faixa de frequência como por exemplo, os médios apenas, ou os subgraves. Existem crossovers de 2, 3, 4 e até de 5 vias. Assim como existem filtros de 4, 5 e 6ª ordem, mas em caso de ordens muito elevadas, compensa mais investir em um filtro ativo, pois se torna muito menos dispendioso.




{kind=link}
{kind=link}